1. 概述
- 若某像素点与周围邻域足够多的像素点处于不同区域,则该像素可能为角点。考虑灰度图像,即若某像素点的灰度值比周围邻域足够多的像素点的灰度值大或小,则该点可能为角点
- Viswanathan D G. Features from accelerated segment test (fast)[J]. Homepages. Inf. Ed. Ac. Uk, 2009.
- 算法特点
- FAST算法比其他角点检测算法要快
- 受图像噪声以及设定阈值影响较大
- 当设置n<12时,不能用快速方法过滤非角点
- FAST不产生多尺度特征,不具备旋转不变性,而且检测到的角点不是最优
2. 算法详解
- 对于图像中一个像素点p,其灰度值为Ip
- 以该像素点为中心考虑一个半径为3的离散化的Bresenham圆,圆边界上有16个像素(如下图所示)
- 设定一个合适的阈值tt,如果圆上有n个连续像素点的灰度值小于Ip−t或者大于Ip+t,那么这个点即可判断为角点(n的值可取12或9)
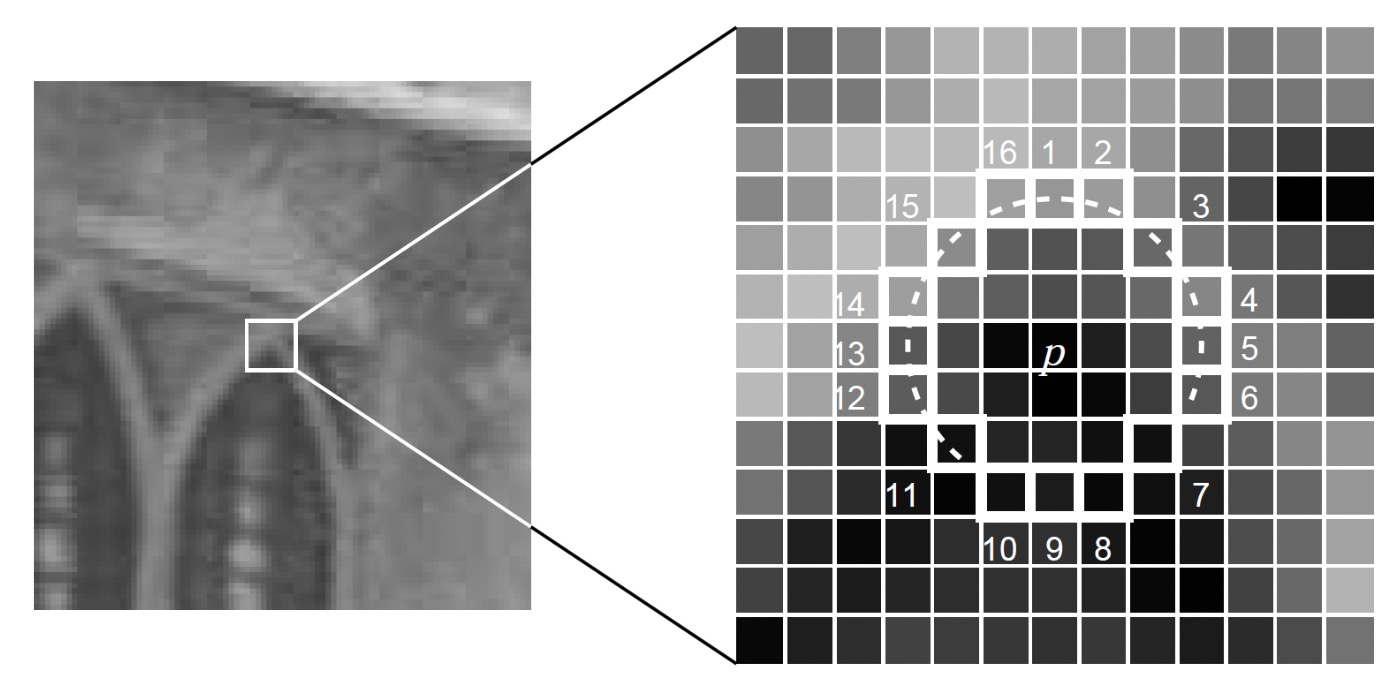
一种快速排除大部分非角点像素的方法就是检查周围1、5、9、13四个位置的像素,如果位置1和9与中心像素P点的灰度差小于给定阈值,则P点不可能是角点,直接排除;否则进一步判断位置5和13与中心像素的灰度差,如果四个像素中至少有3个像素与P点的灰度差超过阈值,则考察邻域圆上16个像素点与中心点的灰度差,如果有至少9个超过给定阈值则认为是角点。
3. 角点分类器
- 选取需要检测的场景的多张图像进行FAST角点检测,选取合适的阈值n(n<12),提取多个特征点作为训练数据
- 对于特征点邻域圆上的16个像素x∈1,2,…,16x∈1,2,…,16,按下式将其划分为3类
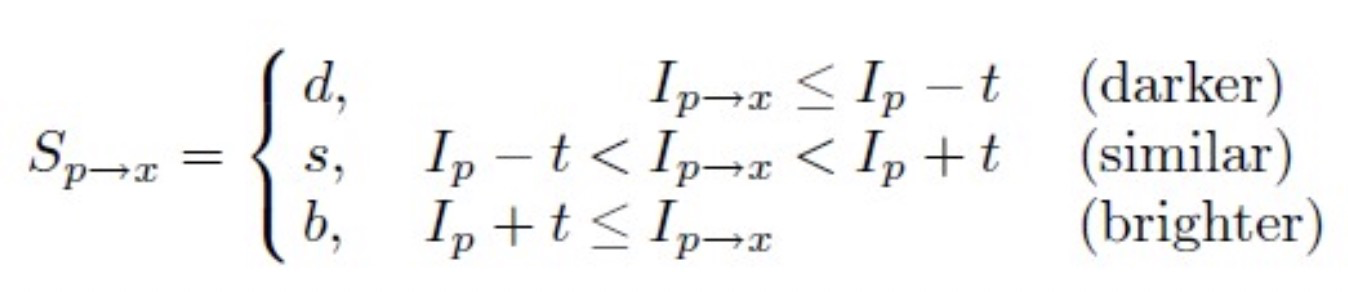
- 对每个特征点定义一个bool变量KpKp,如果pp是一个角点,则KpKp为真,否则为假
- 对提取的特征点集进行训练,使用ID3算法建立一颗决策树,通过第x个像素点进行决策树的划分,对集合P,得到熵值为

- 选择信息增益最大位置进行划分,得到决策树
- 使用决策树对类似场景进行特征点的检测与分类
4. 非极大值抑制
- 对于邻近位置存在多个特征点的情况,需要进一步做非极大值抑制(Non-Maximal Suppression)。给每个已经检测到的角点一个量化的值V,然后比较相邻角点的V值,保留局部邻域内VV值最大的点。V值可定义为
- 特征点与邻域16个像素点灰度绝对差值的和

5. 代码实现
- OpenCV3中FAST方法以FastFeatureDetector类的形式封装,为Feature2D类的子类
1 | class CV_EXPORTS_W FastFeatureDetector : public Feature2D |