1. 高斯模糊概述
高斯模糊(英语: Gaussian Blur), 也叫高斯平滑, 是在 Adobe Photoshop, GIMP 以及 Paint.NET 等图像处理软件中广泛使用的处理效果, 通常用它来减少图像噪声以及降低细节层次.
- 从数学的角度来看, 图像的高斯模糊过程就是图像与正态分布做卷积. 由于正态分布又叫作高斯分布, 所以这项技术就叫作高斯模糊.
- 由于高斯函数的傅立叶变换是另外一个高斯函数, 所以高斯模糊对于图像来说就是一个低通滤波器.
2. 原理
所谓”模糊”,可以理解成每一个像素都取周边像素的平均值,如下图所示:
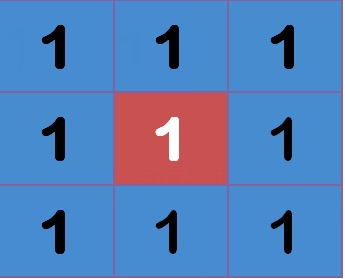
“中间点”取”周围点”的平均值,就是1。在数值上,这是一种”平滑化”。
- 在图形上,就相当于产生”模糊”效果,”中间点”失去细节。显然,计算平均值时,取值范围越大,”模糊效果”越强烈。
- 从数值角度看,就是数值越平滑。
接下来的问题就是,既然每个点都要取周边像素的平均值,那么应该如何分配权重呢?如果使用简单平均,显然不是很合理,因为图像都是连续的,越靠近的点关系越密切,越远离的点关系越疏远。因此,加权平均更合理,距离越近的点权重越大,距离越远的点权重越小。
2.1 正态分布的权重
正态分布显然是一种可取的权重分配模式。在图形上,正态分布是一种钟形曲线,越接近中心,取值越大,越远离中心,取值越小。计算平均值的时候,我们只需要将”中心点”作为原点,其他点按照其在正态曲线上的位置,分配权重,就可以得到一个加权平均值。
一维高斯函数如下公式所述:
,
其中, 由于对于中心点而言,$\mu = 0$。
图像是二维的,因此,图像对应的高斯函数如下公式所述:
.
有了这个函数 ,就可以计算每个点的权重了。
2.2 $\sigma$值介绍
尺度参数$\sigma$决定了分布幅度,在高斯模糊处理中,$\sigma$常取 1.5。
2.3 权重矩阵计算
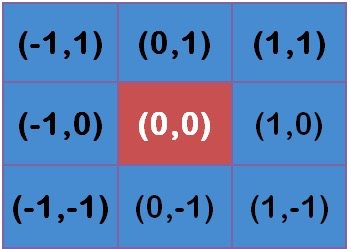
假定中心点的坐标是(0,0),那么距离它最近的8个点的坐标如下:
为了计算权重矩阵,需要设定$\sigma$的值。假定$\sigma = 1.5$,则模糊半径为1的权重矩阵如下:
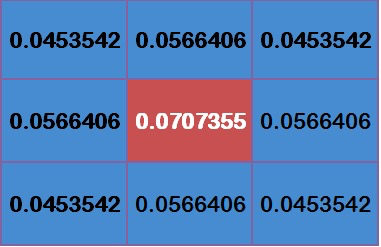
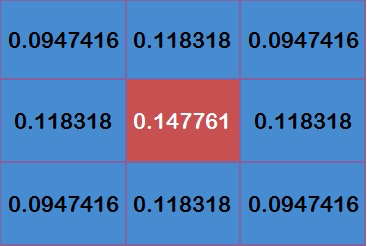
这9个点的权重总和等于0.4787147,如果只计算这9个点的加权平均,还必须让它们的权重之和等于1,因此上面9个值还要分别除以0.4787147,得到最终的权重矩阵。
2.4 计算高斯模糊
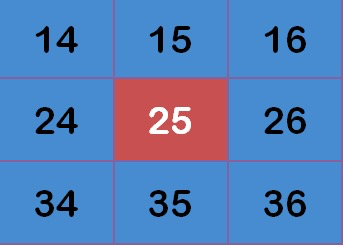
假设现有9个像素点,灰度值(0-255)如下:
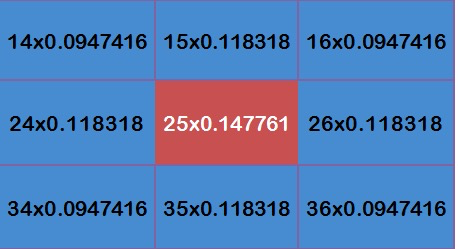
每个点乘以自己的权重值:
得到:
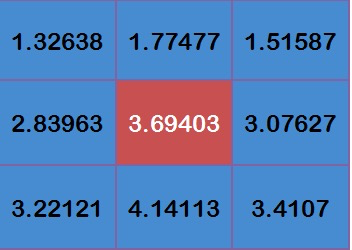
将这9个值加起来,就是中心点的高斯模糊的值。
对所有点重复这个过程,就得到了高斯模糊后的图像。如果原图是彩色图片,可以对RGB三个通道分别做高斯模糊。
2.5 边界点的处理
- 一个变通方法,就是把已有的点拷贝到另一面的对应位置,模拟出完整的矩阵。
- 填充0。
3. 代码实现
1 | import math |